
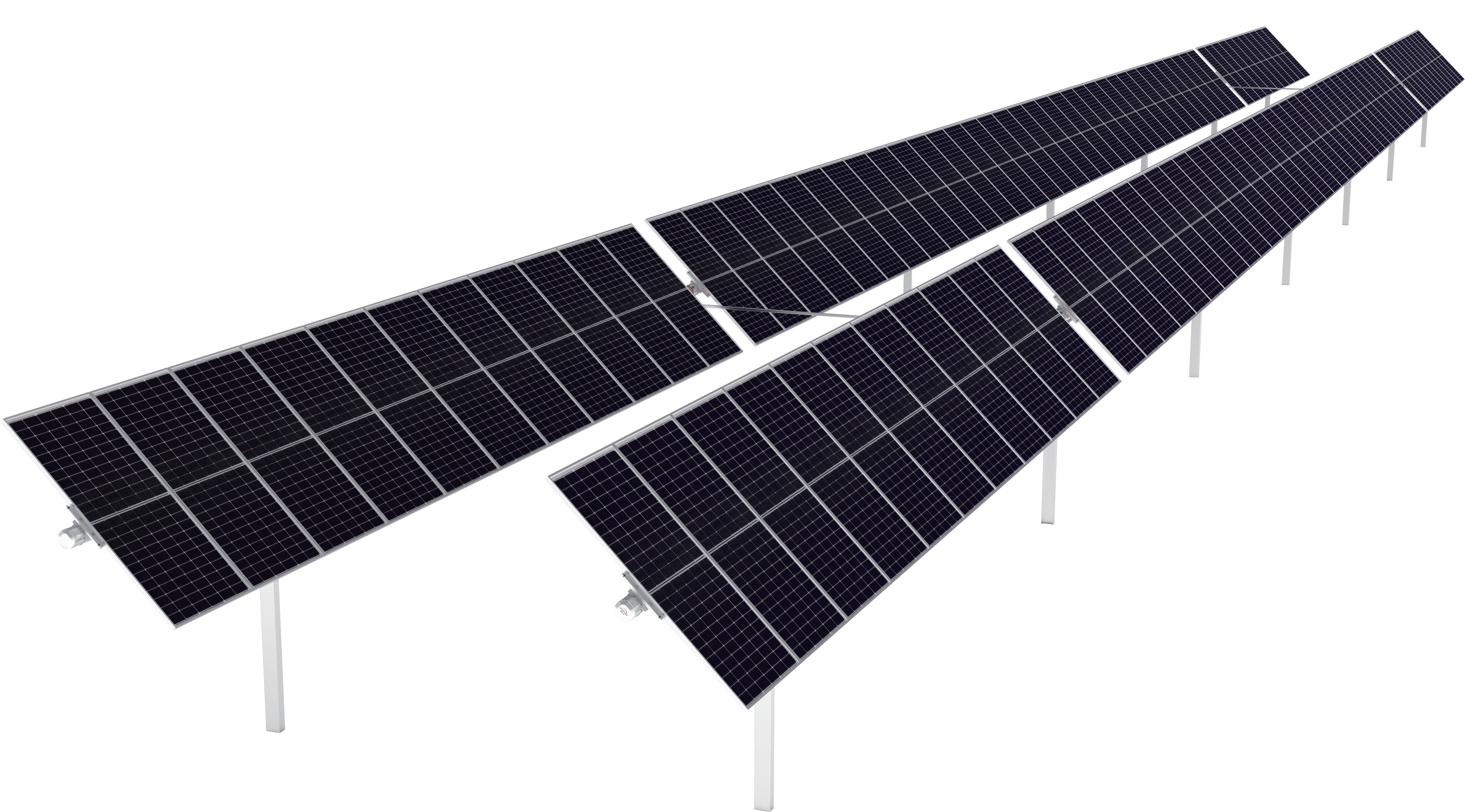
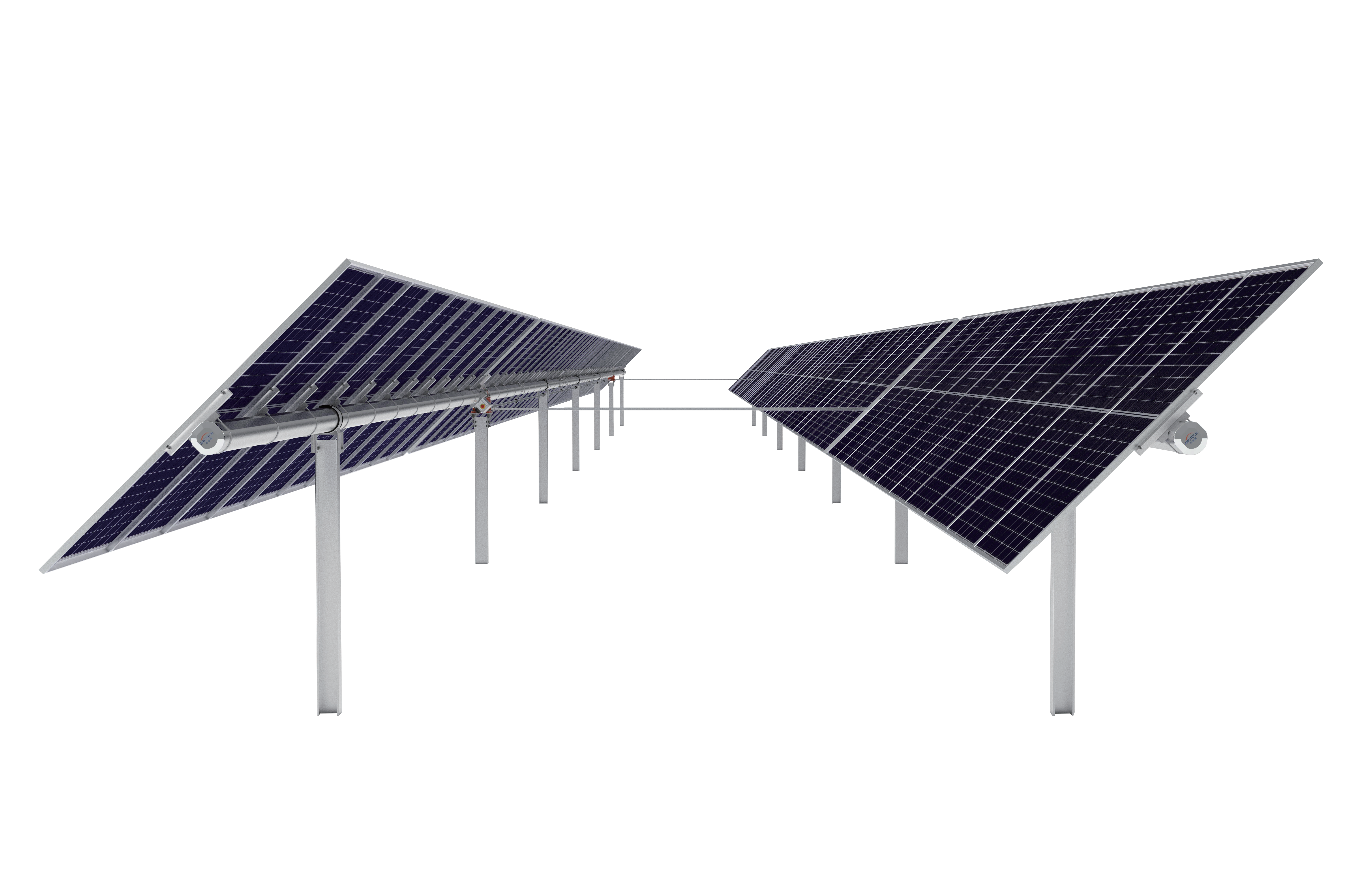

Fonctionnalités:
La protection contre les coups de vent peut atteindre un amarrage de près de 0°, un fonctionnement sûr, une vitesse du vent jusqu’à 22 m/s
Conception de poutre carrée en six dimensions avec une meilleure résistance à la flexion et à la torsion
Entraînement bidirectionnel exclusif Conception brevetée
Plus grande capacité d’adaptation aux terrains irréguliers Plus de capacité installée sous le même terrain
S’adapter à l’angle de nettoyage optimal du robot et améliorer efficacement l’efficacité du fonctionnement et de la maintenance de la centrale électrique
De meilleurs budgets de coûts Efficacité accrue de la production d’énergie
Paramètres du système de chenilles
Paramètres du système de contrôle électronique
| La protection contre les coups de vent peut atteindre un amarrage de près de 0°, un fonctionnement sûr, une vitesse du vent jusqu’à 22 m/s | Système de suivi à axe unique à plat de liaison |
| ± 60 ° | |
| Conception de poutre carrée en six dimensions avec une meilleure résistance à la flexion et à la torsion | Transmission à vis sans fin, entraînement parallèle multipoint |
| Jusqu'à 168 | |
| Entraînement bidirectionnel exclusif Conception brevetée | 300 VDC-1500 VDC |
| Pile d'entrée de marteau/pieux de perfusion/fondation en ciment | |
| Plus grande capacité d’adaptation aux terrains irréguliers Plus de capacité installée sous le même terrain | Galvanisé à chaud/Pré-galvanisé/Plaqué Magnésium Aluminium Zinc Acier |
| La chaîne de groupe est auto-alimentée, batterie au lithium de rechange | |
| S’adapter à l’angle de nettoyage optimal du robot et améliorer efficacement l’efficacité du fonctionnement et de la maintenance de la centrale électrique | Environ 0.04kWh/jour |
| Conception maximale avec une vitesse de vent de 70 m/s | |
| De meilleurs budgets de coûts Efficacité accrue de la production d’énergie | Compatible avec tous les composants |
| Température de l'environnement de travail | -30 °C à 60 °C |
Paramètres du système de contrôle
| Algorithme de contrôle | Algorithme astronomique + Contrôle en boucle fermée du capteur de position |
| Précision de suivi | ≤ 2 ° |
| Suivi inverse | Prise en charge des algorithmes intelligents d'adaptation au terrain |
| Conception des communications | LoRa sans fil ou RS485 filaire |
| Autres modes spéciaux | Mode neige abondante \ mode grêle \ mode inondation |
| Puissance du contrôleur | Alimentation de série de groupe par défaut, en utilisant courant alternatif ou auto-alimenté sur demande |
| Mode inondation | Traqueur de nivellement (facultatif) |
| Mode neige abondante | Angle d'inclinaison maximal du tracker (facultatif) |
| Mode de protection du vent | Arrêt au vent sous petit angle |
