

Avec l'augmentation annuelle de la profondeur d'extraction du charbon en Chine, l'espace de travail souterrain devient de plus en plus restreint. Les bras mécaniques rigides traditionnels et les robots à roues ou à chenilles, en raison de leur volume important et de leur manque de flexibilité, peinent à accomplir les tâches d'inspection, de maintenance et de sauvetage dans les zones complexes telles que les galeries étroites, les fissures d'effondrement et les tranchées de câbles. Une équipe de recherche de China Coal Technology & Engineering Group, de l'Université des sciences et technologies de Xi'an et d'autres institutions a publié une étude de synthèse majeure dans la revue scientifique de premier plan en chinois dans le domaine de la technologie minière internationale, Coal Science and Technology, passant systématiquement en revue les bases théoriques, les technologies clés et les perspectives d'application technique du robot serpentiforme dans les opérations souterraines des mines de charbon. En tant que nouveau type de robot bionique, le robot serpentiforme dépasse les limites de mouvement des bras mécaniques rigides traditionnels, alliant une grande flexibilité et une adaptabilité aux normes antidéflagrantes des mines de charbon, et montre un potentiel d'application significatif dans des scénarios tels que l'inspection souterraine, la maintenance des équipements et le sauvetage d'urgence. Cet article se concentre sur cette recherche révolutionnaire et analyse en profondeur ses points forts techniques et ses orientations futures.
Percée bionique : un saut technologique de la « réplication structurelle » à la « maîtrise du mouvement »
La contribution principale de cette recherche réside dans la construction d'un système théorique de technologies clés pour les robots serpentiformes destinés aux espaces confinés des mines de charbon souterraines, brisant le paradigme limité des équipements mobiles traditionnels au « mouvement rigide et à fonction unique ».
Classification des configurations et limites d'application : portrait précis des trois grands types
À partir de la classification structurelle et des caractéristiques, l'équipe de recherche a systématiquement résumé les avantages et les limites d'application des trois configurations principales de robots serpentiformes : discrète, ondulatoire et continue. Le robot de type discret est constitué de modules unitaires connectés en série, offrant une forte capacité de réhabilitation et de réparation, et étant facile à entretenir ; le type ondulatoire, basé sur une conception à joints télescopiques, permet un contrôle de position de haute précision ; le type continu possède une flexibilité globale supérieure et peut s'étendre dans des canaux courbes complexes. Pour différents scénarios d'espaces confinés tels que les zones exploitées, les galeries de drainage par le bas et l'intérieur des tuyaux de drainage, chaque configuration a ses propres atouts, fournissant une cartographie claire pour la sélection d'équipements dans diverses conditions de travail.
Modélisation cinématique et dynamique : décrypter le code de contrôle des systèmes hautement redondants
Sur le plan théorique, l'équipe de recherche a systématiquement passé en revue les méthodes de modélisation cinématique et dynamique pour les systèmes hautement redondants. Face aux défis de contrôle posés par les environnements dynamiquement incertains et l'interaction avec des terrains complexes, l'accent est mis sur la nécessité du contrôle non linéaire, du contrôle robuste et des mécanismes de fonctionnement en mode dégradé. En établissant des modèles mathématiques entre les angles d'articulation, la vitesse des roues et les obstacles du terrain, et en s'appuyant sur des algorithmes de mouvement assistés par les degrés de liberté redondants, le robot serpentiforme peut réaliser des allures de rampement et de virage plus fluides et plus stables dans des zones à obstacles très bas comme les galeries inclinées et les tranchées de câbles.
Fusion de perception multimodale et navigation sous contraintes de communication : avancer « sans fenêtre » dans un brouillard épais
L'intérieur des mines de charbon est un environnement typique où la communication est limitée. La poussière, le brouillard d'eau et les champs magnétiques puissants perturbent gravement les signaux sans fil traditionnels. L'équipe de recherche a résumé l'applicabilité technique des solutions de fusion de capteurs multimodaux utilisant le LiDAR, les caméras de profondeur, les centrales inertielles, etc., afin de dépasser les limites de perception d'un capteur unique. Parallèlement, grâce à des systèmes embarqués dotés de capacités de calcul en périphérie (edge computing), la navigation autonome et la planification de trajectoire dans des environnements locaux à faible vitesse sont réalisées, améliorant considérablement la capacité de détection et d'évitement d'obstacles du robot dans des conditions de zone aveugle.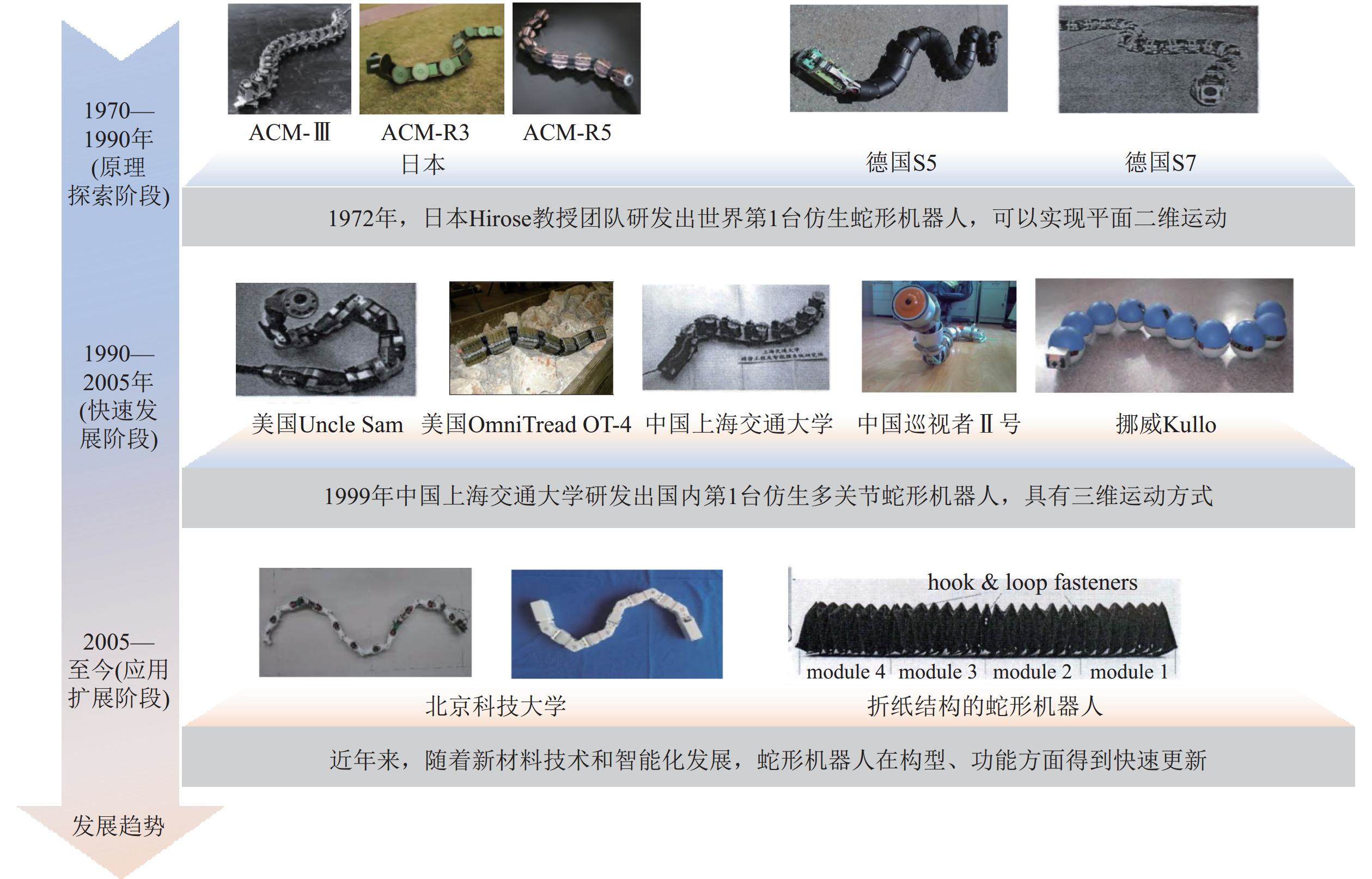
Faire face aux goulets d'étranglement : l'application industrielle doit encore franchir « trois montagnes »
Tout en reconnaissant l'énorme potentiel d'application, la recherche souligne également de manière pragmatique les principaux goulets d'étranglement auxquels le robot serpentiforme est actuellement confronté pour une promotion industrielle à grande échelle dans les mines de charbon :
La contradiction technique entre l'antidéflagrance et l'allègement : Le risque d'explosion du méthane dans les mines de charbon est élevé, et les boîtiers antidéflagrants augmentent souvent considérablement le poids et le volume de la machine, ce qui va à l'encontre de son besoin naturel de légèreté et de haute flexibilité. Comment réaliser une conception à la fois intrinsèquement sûre et ultralégère est le premier obstacle à franchir pour l'application concrète.
La fusion stable des informations multisensorielles : L'intérieur des mines de charbon est faiblement éclairé et rempli de poussière, ce qui entraîne des différences de confiance considérables entre les différents capteurs selon l'environnement, rendant la stabilité et la synergie de la fusion de perception multisource insuffisantes.
La localisation de haute précision et la prise de décision autonome sous contraintes de communication : Dans les espaces souterrains profonds sans couverture GPS ni même UWB, comment réaliser une localisation de haute précision et prendre des décisions autonomes sous contraintes de risque est un problème critique qui entrave le fonctionnement indépendant.
De « l'intelligence ponctuelle » à « l'intégration systémique » : une tendance inévitable
Malgré les défis mentionnés ci-dessus, la feuille de route technologique clé proposée par la recherche indique néanmoins la direction pour la prochaine étape de l'intelligence des mines de charbon. En perspective, avec la création de nouvelles plateformes telles que la « Base pilote de robots à intelligence incarnée de la Grande Baie Guangdong-Hong Kong-Macao » par l'Académie chinoise des sciences du charbon, et l'amélioration des environnements de test et de simulation associés, l'industrialisation du robot serpentiforme entre dans une voie rapide.
Inspection permanente des espaces confinés : voir profondément, voir avec précision
Dans les points à risque difficiles d'accès pour le personnel, tels que les galeries de convoyeurs à bande, l'intérieur des conduits étanches et les abords des zones exploitées, le robot serpentiforme peut emporter des caméras haute définition, des imageurs thermiques et divers capteurs de gaz pour effectuer des inspections cycliques automatisées. L'équipe de recherche souligne qu'en utilisant les données historiques existantes pour créer une grande base de données, combinée à des algorithmes d'IA, il est possible d'alerter précocement en cas de température anormale des équipements ou de présence de gaz, réalisant ainsi un saut de « l'inspection » à « l'inspection intelligente ».
Sauvetage d'urgence en environnement complexe : oser être le premier, sauver des vies
En cas de catastrophe, grâce à sa silhouette fine et ses articulations très flexibles, le robot serpentiforme peut s'infiltrer dans les fissures de gravats après une explosion majeure de gaz ou un effondrement dû à une inondation, détecter les signes vitaux avant les équipes de secours et établir un relais de communication d'urgence temporaire. C'est une valeur unique que tout autre robot rigide ou moyen de sauvetage manuel peut difficilement égaler.
Opérations auxiliaires sur les fronts de taille entièrement mécanisés sans personnel : intégration de la collaboration homme-machine
Dans le cadre de la tendance générale à l'exploitation minière intelligente et sans personnel progressivement mise en œuvre, le bras serpentiforme sera monté sur des tunneliers ou des soutènements marchands. Lors du traitement du desserrage des boulons d'ancrage, des pannes de câbles ou de l'inspection des structures internes, il jouera un rôle auxiliaire grâce à sa miniaturisation et à son bras à haut degré de liberté, réduisant considérablement le risque de contact direct du personnel dans les maillons à haut risque.
Construction d'un nouvel écosystème « Intelligence Artificielle + Équipement Minier »
La recherche souligne enfin que le futur robot serpentiforme minier ne sera pas seulement un matériel isolé en première ligne, mais devra s'intégrer pleinement dans le système « d'intelligence incarnée » de la mine. Grâce au déploiement de grands modèles dans le cloud, à la télécommande 5G et à l'ordonnancement distribué des tâches, un seul corps de robot serpentiforme pourra réaliser des mises à jour instantanées de modèles et un partage de connaissances entre différents terminaux miniers, améliorant considérablement l'efficacité d'utilisation et la capacité de réponse des équipements entre plusieurs mines.
Utiliser « l'intelligence flexible » pour consolider les fondations de la sécurité de la production
La valeur profonde de cette recherche réside dans le changement fondamental du mode d'interaction homme-machine dans les espaces souterrains à haut risque en Chine. Bien que le nombre total d'accidents miniers en Chine ait nettement diminué, le pays se trouve encore dans une phase de transition cruciale vers l'objectif de « zéro décès, zéro accident ». Avec la publication successive par des entreprises leaders comme China Coal Technology & Engineering Group de bras mécaniques serpentiformes et de robots de détection dotés de droits de propriété intellectuelle indépendants, et l'approfondissement des projets nationaux connexes dirigés par l'académicien Ge Shirong, les maintenances de précision et les sauvetages extrêmes auparavant « impossibles » connaissent des percées tangibles.
De la percée des mécanismes bioniques à celle du contrôle de la perception, puis à celle de l'ingénierie système, le robot serpentiforme est déjà devenu un terrain de compétition central pour « l'intégration profonde de l'informatisation et de l'industrialisation de l'industrie charbonnière chinoise » et la « construction intelligente du 15e plan quinquennal ». Comme l'indique la recherche, les futures percées se concentreront sur des structures antidéflagrantes et légères adaptées aux scénarios de travail typiques des mines, une perception fiable et un contrôle autonome sous contraintes de risque dans des conditions de fonctionnement dégradées, afin de fournir un soutien d'équipement central stable et efficace pour l'exploitation minière intelligente du charbon.