

Lorsque le signal des systèmes globaux de navigation par satellite est totalement interrompu, comment une chargeuse transportrice de mine souterraine peut-elle se déplacer de manière autonome dans des galeries étroites et sinueuses, et traverser rapidement les zones de travail denses entre les chantiers d'abattage et les points de déchargement ? Pendant longtemps, la navigation autonome des chargeuses transportrices souterraines a reposé sur la navigation absolue (AN) ou la navigation réactive (RN). La première est sujette à l'accumulation d'erreurs lors de virages successifs multiples, tandis que la seconde manque de capacité de positionnement global dans les longues sections droites. Une équipe conjointe de l'Université de Chongqing, de l'Université Centrale du Sud, de l'Université de Fuzhou et d'autres instituts a récemment proposé une stratégie de navigation hybride, déployant de manière collaborative dans l'espace et le temps les avantages du positionnement précis par carte préétablie et de la perception dynamique par capteurs en temps réel, résolvant pour la première fois dans un même cadre le problème des opérations en profondeur : « ne pas se perdre dans les virages, ne pas dériver en ligne droite ». 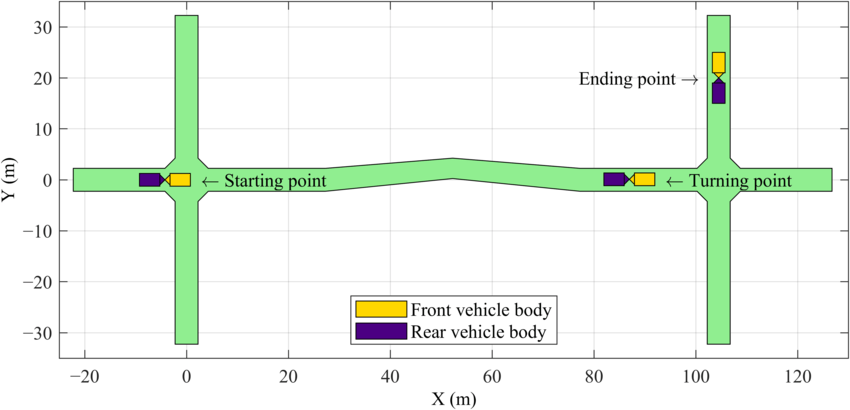
Précision absolue, mais avec une « dérive » ; Réactivité agile, mais avec un « aveuglement »
Les LHD sont les équipements centraux de l'exploitation sans rail dans les mines souterraines, chargés de transporter le minerai abattu du chantier jusqu'au point de déchargement en suivant les galeries. L'opération traditionnelle avec conducteur présente des risques de forte poussière, d'humidité élevée, de bruit et même d'effondrement, rendant la transition vers l'autonomie urgente.
Dans l'environnement souterrain où le signal GPS est totalement bloqué, deux voies techniques principales existent actuellement :
La navigation absolue repose sur un LiDAR/une centrale inertielle couplés à une carte préétablie. Elle présente des avantages évidents dans les virages des galeries, permettant un positionnement précis au centimètre près. Mais le problème est qu'à long terme, les perturbations telles que les erreurs de direction mécaniques, l'usure des pneus et l'affaissement de la suspension entraînent facilement une accumulation progressive des erreurs — en entrant dans une galerie étroite, un positionnement absolu « trop confiant » peut amener le véhicule à frotter contre les parois, voire à se bloquer dans la galerie.
La navigation réactive, à l'inverse, ne dépend pas d'une carte préétablie. Elle perçoit dynamiquement l'environnement et s'ajuste instantanément grâce à des capteurs en temps réel (LiDAR, caméras visuelles, ultrasons). Elle est flexible et efficace dans les sections droites et dégagées, mais dans les terrains à intersections multiples ou virages profonds, ne pouvant obtenir une pose globale, elle risque facilement de « se perdre » — choisir la mauvaise sortie, voire se retrouver piégée dans une boucle sans issue.
L'équipe du premier auteur de l'article a analysé en profondeur ce dilemme : « La navigation absolue et la navigation réactive ont chacune leurs avantages, mais ni le suivi de trajectoire unique, ni la perception purement en temps réel ne peuvent couvrir entièrement un environnement souterrain complexe et changeant. » Comment intégrer ces deux technologies sur une même chargeuse transportrice et basculer automatiquement entre elles selon les sections de route est devenu le goulot d'étranglement clé pour le passage de la navigation autonome des LHD de la théorie au déploiement technique.
Déploiement collaboratif, tirer parti des forces de chacun — du « choix binaire » au « basculement automatique »
Le 20 avril 2026, une équipe de recherche conjointe de l'École des ressources et de l'ingénierie de sécurité de l'Université de Chongqing, de l'École des ressources et de l'ingénierie de sécurité de l'Université Centrale du Sud, de l'École de géologie et d'exploitation minière Zijin de l'Université de Fuzhou et de Shenzhen Zhongjin Lingnan Nonfemet Co., Ltd., a publié des résultats de recherche dans la revue internationale faisant autorité en robotique, le « Journal of Field Robotics », proposant pour la première fois une stratégie de navigation hybride. L'innovation centrale de cette stratégie réside dans le déploiement collaboratif des avantages de la navigation absolue et de la navigation réactive dans le temps et l'espace.
Conception centrale : une logique de basculement spatio-temporel où « la navigation absolue est responsable des virages, la navigation réactive des lignes droites », pour réaliser une sélection de mode optimale autonome. Dans les virages des galeries, le système s'appuie sur la carte préétablie pour un positionnement précis, réalisant un suivi de trajectoire fiable grâce aux caractéristiques géométriques connues de l'environnement ; une fois le virage terminé et l'entrée dans une longue galerie droite, le système bascule automatiquement en navigation réactive, ne dépendant plus du positionnement absolu, et ajuste la trajectoire instantanément uniquement via les données LiDAR et odométriques en temps réel, réalisant ainsi le principe de « n'utiliser les 'munitions de précision' qu'en cas de nécessité, et passer en 'croisière à faible consommation' sur les sections stables ».
Vérification expérimentale : les essais de simulation montrent que cette navigation hybride surpasse nettement l'utilisation seule de l'AN ou de la RN en termes de précision dans les virages étroits et de robustesse en ligne droite. Les essais sur le terrain en chantier ont en outre validé la capacité de stabilité du système dans des conditions de travail réelles : la chargeuse transportrice peut atteindre une vitesse d'environ 1,8 m/s en section droite et 0,6 m/s en virage dans des galeries étroites typiques, tout en maintenant un fonctionnement stable malgré une forte poussière, un faible éclairage et de multiples obstacles.
D'une « solution unique » à une « architecture fusionnée » — un changement de paradigme pour la navigation autonome des LHD
L'essence de cette recherche est de faire évoluer le système de navigation des LHD d'une solution fixe vers une architecture fusionnée « adaptative à la route ». À un niveau plus profond, la stratégie HN, en basculant entre différents modules de navigation selon les sections de route, forme une conception robuste généralisable — même si un module subit une baisse de performance instantanée dans des conditions extrêmes de forte poussière, d'eau stagnante et de sources d'interférences multiples, l'autre module peut prendre le relais pour le positionnement ou l'évitement d'obstacles, assurant la continuité de la mission. En d'autres termes, HN ne conserve pas simplement deux systèmes, mais les fait coopérer en relais sur l'axe temporel, éliminant conjointement l'erreur cumulative de la navigation absolue pure et le risque de « se perdre » de la navigation réactive pure.
L'article souligne également que la caractéristique de cette stratégie d'ajuster la trajectoire de manière indépendante « sans dépendre du positionnement absolu » dans les sections droites ouvre de nouvelles possibilités pour des extensions futures. Cela laisse une interface pour introduire ultérieurement des algorithmes de maintien de voie plus légers, voire des schémas d'assistance par capteurs distribués dans les longues galeries droites — signifiant que HN ne résout pas seulement les problèmes actuels, mais possède également une base architecturale pour une itération et une extension continues. Pour les mines réelles, atteindre de manière stable les vitesses mentionnées dans un environnement souterrain sans GPS signifie également que les LHD possèdent une capacité technique véritablement capable de remplacer le travail humain dans des processus clés comme les rotations en fond de mine et le transport dans les chantiers.
Le moteur fondamental de l'exploitation profonde
Avec l'approfondissement continu des profondeurs d'extraction en Chine, la réduction des rayons de courbure des galeries, l'aggravation des contraintes thermiques et de la poussière, et l'atténuation des communications, les risques et les défis de confort pour les opérations manuelles traditionnelles ne cessent de croître. La navigation autonome est devenue un besoin impératif pour l'exploitation sans personnel dans les chantiers profonds à fort pendage. La valeur de la stratégie de navigation hybride réside précisément en cela — elle ne dépend pas d'infrastructures de localisation externes comme la 5G ou l'UWB, et peut accomplir la navigation autonome en s'appuyant uniquement sur les capteurs embarqués et une carte préétablie. Elle est extrêmement adaptée aux puits profonds où l'atténuation des communications est sévère, et son coût de déploiement est bien inférieur aux solutions alternatives de couverture totale par stations de localisation. Parallèlement, la capacité de redondance « positionnement + évitement d'obstacles » offerte par HN fournit une base de sécurité pour le travail collaboratif entre les chargeuses transportrices et d'autres véhicules de faible hauteur dans les zones aveugles aux capteurs souterrains, apportant de nouvelles garanties pour les opérations mixtes en fond de mine.
Dans les applications pratiques, avec la baisse continue des coûts de détection et de calcul, la solution de navigation autonome pour LHD basée sur le cadre HN passe également de « capable de rouler » à « rouler de manière stable, durable et sûre ».
Construire une capacité fondamentale solide pour les mines sans personnel
La planification de trajectoire, la précision de localisation et la robustesse opérationnelle des LHD sont des maillons clés pour le passage de l'automatisation de l'exploitation souterraine de la « démonstration unitaire » au « déploiement réel ». La stratégie HN offre une solution centrée sur le « principe d'adaptation optimale », qui ne se limite pas aux LHD mais peut être étendue à d'autres équipements sans rail en fond de mine, construisant une « base de navigation universelle » dans les environnements d'extraction profonde sans GPS, avec des galeries à multiples intersections et des sources de perturbations complexes.
On peut dire que la stratégie de navigation hybride donne pour la première fois aux chargeuses transportrices des mines souterraines la double assurance de « savoir où elles sont » et de « savoir où aller ». C'est à la fois une percée face au dilemme du « choix binaire » pour la navigation autonome souterraine, et cela fournit une solution technique fondamentale robuste, réalisable et extensible pour que les mines intelligentes passent de la téléopération à distance à une exploitation véritablement autonome.