
Domaine d'utilisation
Applicable aux couches de charbon quasi horizontales avec un toit relativement stable, ainsi qu'aux grandes sections de galeries de charbon présentant des éboulements latéraux et des inclusions de gangue.
Caractéristiques de performance
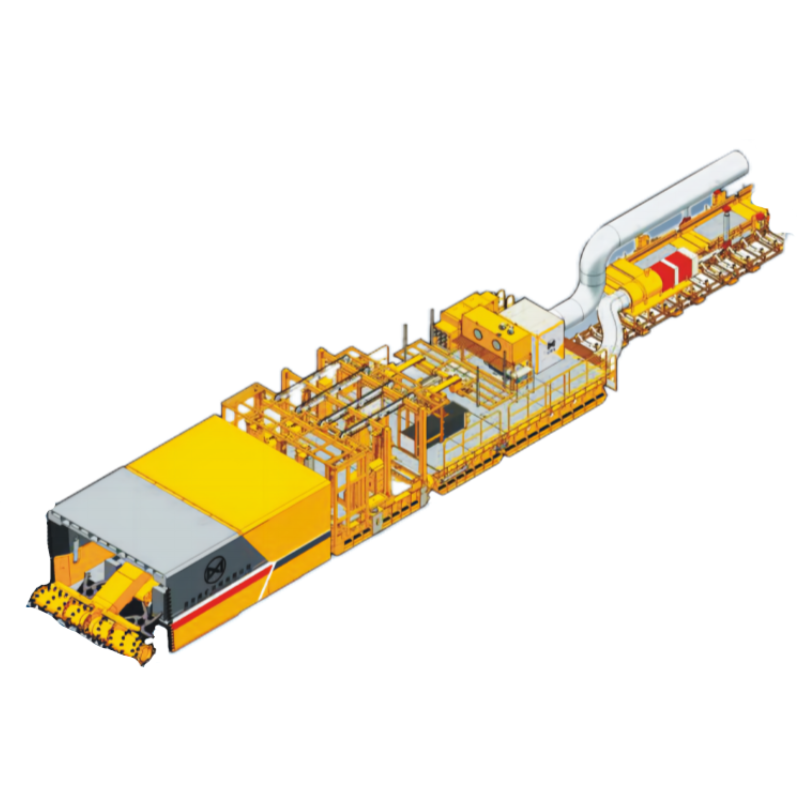
Intégration dans le système de robot intelligent d'avancement de fonctions telles que la détection, l'excavation, le soutènement, l'ancrage, le transport, la ventilation et le dépoussiérage, avec une collaboration entre plusieurs robots.
Réalisation par le robot d'avancement d'une coupe complète de la section en une seule passe, opérant en parallèle avec le robot de forage et d'ancrage.
Dotation des robots de soutènement temporaire I et II de capacités telles que le déplacement autonome, le positionnement directionnel, la correction de posture, le soutènement temporaire et la protection collaborative, garantissant une sécurité lors des opérations.
Capacité du robot de forage et d'ancrage à effectuer automatiquement la prise de filet, le forage en un clic et l'ancrage en un clic, tout en étant équipé d'un bouclier latéral empêchant les éboulements.
Aptitude du robot de transport de filets d'ancrage à prendre et livrer automatiquement les filets, tout en collaborant avec le robot de forage et d'ancrage pour leur transport.
Suivi par le convoyeur à bande, via une queue mobile autonome, du système intelligent d'avancement rapide, permettant un déplacement synchrone.
Satisfaction par le système de forage de détection des exigences réglementaires de sécurité, imposant une détection préalable à chaque avancement.
Perception et affichage par le système de surveillance environnementale des informations telles que la concentration de méthane, la teneur en oxygène, le débit d'air, la température, l'humidité et la poussière sur le front d'avancement.
Mise à disposition par le centre de contrôle intégré de fonctions telles que le démarrage/arrêt à distance en un clic, l'intervention à distance, la surveillance virtuelle et la vidéosurveillance à distance.
1/1
 Système de robot intelligent d’avancement
Système de robot intelligent d’avancement
Demander un devis
Chine
7, rue centrale de Jingpu, nouvelle ville de Jingwei, zone de développement économique et technologique de Xi'an, province du Shaanxi
+86 29 68297888
xamkjxyxgs@163.com
Présentation
Paramètres du produit
|
Projet |
Unité |
Robot de creusement de tunnels à bouclier intelligent |
|
Nombre de bras de forage |
|
En fonction de la situation réelle |
|
Section de tunnel applicable (largeur × hauteur) |
(m) |
Hauteur 3,0~4,8 Largeur 5,0~6,5 |
|
Méthode de coupe |
- |
Axe horizontal |
|
Puissance de coupe |
(kW) |
270/300 |
|
Forme de la machine de transport |
- |
Chaîne simple intermédiaire |
|
Formulaire de chargement |
- |
Mécanisme d'engrenage en étoile |
|
Style de marche |
- |
Avancement |
|
Pente d'adaptation |
(°) |
Quasiment horizontal |
|
Volume d'air de dépoussiérage |
(m3/min) |
400-600 |
|
Longueur de la détection avancée |
(m) |
≥100 |
|
Longueur du système |
(m) |
70-100 |
|
Distance du pas de cycle |
(m) |
800-1000 |
|
Longueur de chevauchement de la courroie de transfert |
(m) |
Conforme aux exigences de progression quotidienne |
|
Tension d'alimentation |
(V) |
1140 |
|
Méthode de contrôle |
- |
Commande manuelle, télécommande, surveillance à distance |
Autres Produits

Demander un devis
Haveuse à traction AC de la série MG200/468-WD
Demander un devis
Haveuse à traction AC de la série MG2x160/730-AWD
Demander un devis
3 Haveuse à traction AC de la série MG900/2320-WD
Demander un devis
Haveuse à traction AC de la série MG750/1860-WD
Demander un devis
Haveuse à traction AC de la série MG500-FD
Demander un devis
Haveuse à traction AC de la série MG200/490-AWD
Demander un devis
Haveuse à traction AC de la série MG2x250/1120-AWD
Demander un devis
EBZ160M-2 Machine de creusement et d’ancrage
Demander un devis
Haveuse à traction AC de la série MG400/930-AWD
Demander un devis
EBZ200M-2/4 Machine de creusement et d’ancrage
Demander un devis
Haveuse à traction AC de la série MG2x250/1200-AWD
Demander un devis
Haveuse à traction AC de la série MG2x1001460-BWD
Produits Associés
3 Haveuse à traction AC de la série MG900/2320-WD
Demander un devis
Système d’alimentation en liquide intégré intelligent
Demander un devis
Nouveau moteur à aimant permanent à engrenages 3300V (racleur)
Demander un devis
Engin d'ancrage hydraulique pour mines de charbon CMM2-15 et CMM2-15Y
Demander un devis
Longue durée de vie super batterie capacitive type de boulon de soudage électrique 2.7v3000f faible résistance interne grand courant peut personnaliser le moule de groupe
4 /4USD/PCS
Série de câbles pour mines de charbon
Demander un devis
Convoyeur à bande TD75
Demander un devis

Navigation

Présentation

Rejoignez Wedoany.com

Contactez Wedoany.com
Service: +86-10-63388288
Tél. commercial: +86-10-63990880
E-mail: office@wedoany.com
Adresse: Bâtiment de Langue Étrangère de Chine, N ° 89, Rue du Nord, Boulevard du 3e Cercle Ouest, District de Haidian, Pékin
Liens: Portail du Gouvernement République Centrafricaine
| Portail Officiel du Gouvernement du Niger
| Présidence de la République du Mali
| Présidence de la République de Madagascar
| Présidence de la Republique du Congo
| Site officiel du Gouvernement de la France
| Présidence de la République du Cameroun
| Gouvernement de la République de Guinée
广播电视节目制作经营许可证 京广行许字(2024)00312024052400034号 丨 医疗器械经营许可证 京顺药监械经营许20250083号
药品医疗器械网络信息服务备案 丨 (京)网药械信息备字(2025)第 00328 号