fr.wedoany.com Rapport : Giacomo Sasso, chercheur postdoctoral à la Faculté d'ingénierie et de sciences des matériaux de l'Université Queen Mary de Londres, a inventé un capteur tactile basé sur des matériaux mécanochromiques, capable de transformer des forces mécaniques invisibles en motifs colorés dynamiques, permettant une visualisation instantanée de cartes de contact, de déformation et de pression à haute résolution. L'équipe a déjà réussi à capturer les crêtes des empreintes digitales, démontrant ainsi la résolution extrêmement élevée de ce capteur.
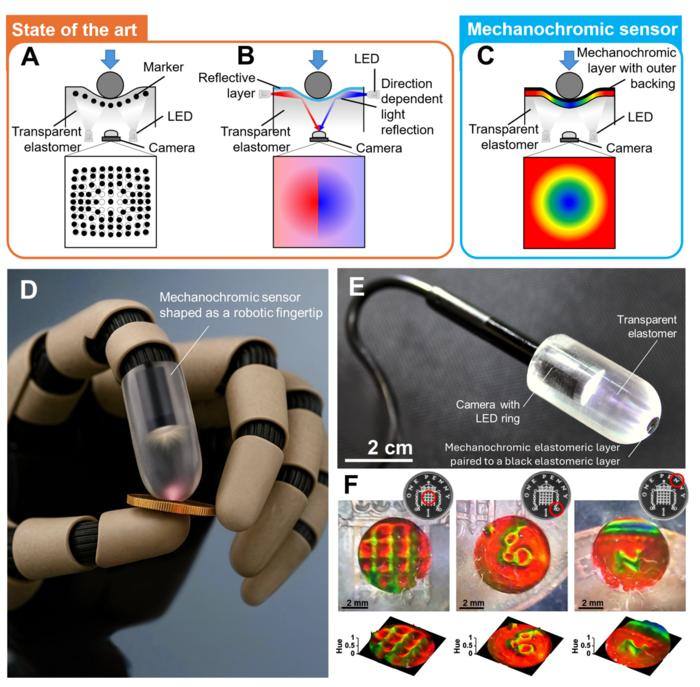
Lorsqu'une pression est appliquée sur la surface sensorielle souple, le matériau produit des couleurs structurelles variant dans l'espace, qui peuvent être capturées en temps réel à l'aide d'une caméra standard, sans nécessiter d'algorithmes de reconstruction complexes. Cette technologie pourrait être utilisée dans le domaine de la fabrication de précision pour développer des pinces robotiques capables d'assembler finement des composants à l'échelle microscopique, où chaque variation infime de force est visible en temps réel. Dans le domaine médical, les prothèses externes pourraient bénéficier d'une perception tactile plus riche, et les systèmes chirurgicaux pourraient lire des signaux de pression précis via des réponses colorées, aidant à distinguer les tissus sains des tissus anormaux.
Contrairement aux capteurs tactiles traditionnels qui reposent sur des réseaux de capteurs intégrés, ce nouveau système intègre directement la fonction de détection dans le matériau. Les interactions mécaniques sont converties en champs de couleurs, et les données peuvent être lues à l'aide d'une simple caméra USB à faible coût. L'équipe a présenté la première solution en temps réel dans ce domaine. Giacomo Sasso a déclaré que la main humaine possède plus de 10 000 mécanorécepteurs, et qu'il est difficile pour les technologies existantes d'atteindre une densité de réseau de capteurs équivalente. Ce projet transfère la fonction de détection au matériau lui-même, simplifiant l'architecture du système et générant des cartes de pression riches.
Les co-auteurs du projet, issus de l'Université de Florence, de l'Université de Trieste et de l'Université de Trente, s'accordent à dire que l'avantage de l'information réside dans le fait qu'elle est déjà contenue dans le signal lumineux, éliminant ainsi le besoin de reconstruire le toucher, qui peut être observé directement. Le professeur James Busfield a déclaré : « Vous ne reconstruisez plus le toucher, vous l'observez directement. » Ce projet vise à résoudre le compromis de longue date dans la détection tactile basée sur la vision : les systèmes à haute résolution ont une charge de calcul importante, tandis que les systèmes rapides sacrifient les détails spatiaux. Cette recherche fusionne les domaines de la robotique douce et de la science des matériaux, s'appuyant sur la collaboration entre le professeur Federico Carpi de l'Université de Florence et le professeur Busfield, et orientant les matériaux mécanochromiques vers une nouvelle direction de recherche, où le matériau lui-même devient le support de détection, codant directement les interactions mécaniques en signaux lumineux visibles, plutôt que de dépendre de composants microélectroniques pour interpréter les déformations.