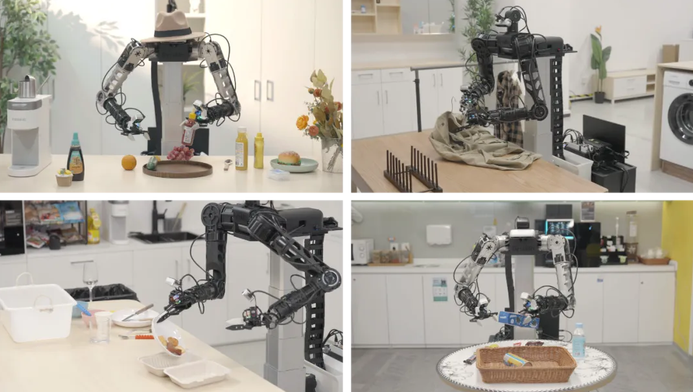
Le 22 juillet, l'équipe Seed de ByteDance a lancé le modèle de robotique universel GR-3. Contrairement aux modèles VLA nécessitant un entraînement intensif sur des trajectoires robotiques, GR-3 peut être affiné efficacement avec peu de données humaines, permettant un transfert rapide et économique vers de nouvelles tâches et la reconnaissance de nouveaux objets. De plus, GR-3 excelle dans les tâches longues et les opérations nécessitant une grande dextérité. Parallèlement, l'équipe Seed a développé un robot mobile à double bras, ByteMini, conçu pour intégrer le modèle GR-3 et exécuter efficacement des tâches complexes en environnement réel. Selon l'équipe, les recherches futures incluront l'augmentation de l'échelle du modèle, l'expansion des données d'entraînement et l'intégration de l'apprentissage par renforcement.