

Des chercheurs de la John A. Paulson School of Engineering and Applied Sciences de l'Université Harvard ont récemment publié une nouvelle étude dans la revue « Advanced Materials », présentant une technique d'impression 3D innovante pour fabriquer des robots souples. Cette méthode permet d'imprimer en une seule étape des structures flexibles complexes avec des canaux internes creux intégrés, offrant une nouvelle approche pour simplifier la conception et le contrôle des robots souples.
La fabrication traditionnelle des robots souples repose généralement sur des processus de moulage et d'encapsulation multicouches, qui sont fastidieux et difficiles à contrôler avec précision pour les structures internes. L'équipe de recherche, dirigée par l'étudiant diplômé Jackson Wilt et l'ancienne chercheuse postdoctorale Natalie Larson, s'est appuyée sur une technologie d'impression 3D multimatériaux rotative précédemment développée par le laboratoire de Jennifer Lewis pour réaliser la mise en forme directe des structures. Cette technique permet l'extrusion simultanée de plusieurs matériaux via une seule buse, avec une rotation précise pendant l'impression pour personnaliser la distribution et les motifs des matériaux.
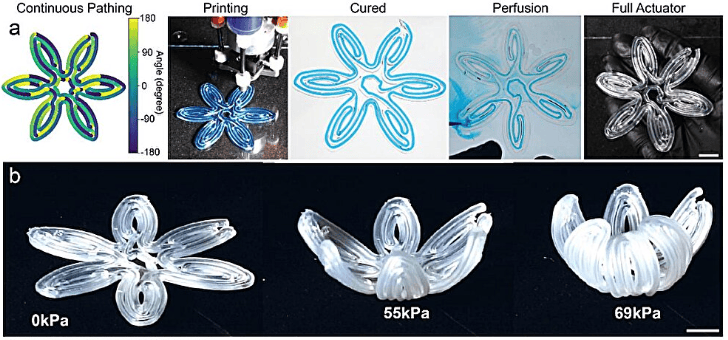
« Nous utilisons deux matériaux provenant de la même sortie, et nous pouvons contrôler la direction de flexion du robot lors du gonflage en le faisant tourner », explique Wilt. « Notre objectif est de créer des robots souples biomimétiques pour diverses applications. » L'équipe a utilisé du polyuréthane comme matériau de coque et du poloxamère, un polymère couramment utilisé dans les gels coiffants, pour constituer les canaux internes solubles. Après l'impression, le matériau du noyau interne est dissous, formant un réseau avec des canaux creux de précision. En pressurisant ces canaux par gonflage, toute la structure peut se plier et se déformer de manière contrôlée, selon une programmation préalable.
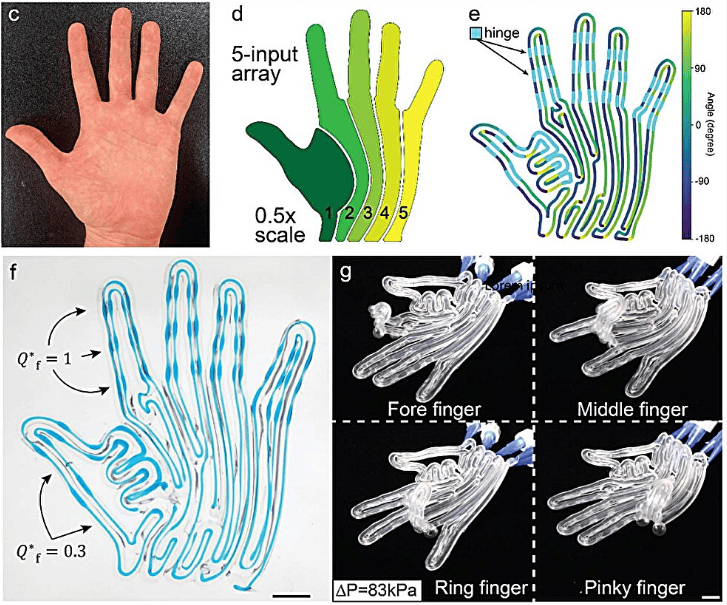
Ce procédé de fabrication intégré évite la dépendance aux moules des méthodes traditionnelles, simplifiant considérablement le processus de production. Wilt souligne : « Dans ce travail, nous n'avons pas besoin de moules. Nous imprimons la structure, la programmons rapidement et pouvons personnaliser rapidement son mode d'actionnement. » L'équipe a déjà utilisé cette technique pour fabriquer avec succès des structures planes avec des motifs complexes ainsi que des dispositifs de préhension à plusieurs doigts avec des « articulations » flexibles, démontrant son potentiel pour fabriquer des actionneurs souples à capacité de déformation contrôlable.
Cette recherche fournit une solution de fabrication efficace et personnalisable pour développer des robots souples destinés à des domaines tels que l'assistance médicale, la manipulation de précision et la préhension flexible. Wilt indique que cette technologie de fabrication rapide pourrait avoir de vastes perspectives d'application dans les futurs robots chirurgicaux et les dispositifs d'assistance humaine.
Plus d'informations : Auteurs : Jackson K. Wilt et al., Titre : « Impression 3D multimatériaux rotative pour des matériaux de robots souples avec dispositifs pneumatiques asymétriques intégrés », Publié dans : « Advanced Materials » (2025). Informations sur la revue : Advanced Materials