fr.wedoany.com Rapport : Des chercheurs du Massachusetts Institute of Technology (MIT) ont mis au point un bracelet à ultrasons capable de suivre les mouvements de la main et de contrôler sans fil un robot, une technologie qui pourrait transformer les interactions homme-machine.
Ce bracelet combine des micro-capteurs à ultrasons et l’intelligence artificielle pour convertir les mouvements des muscles et des tendons du poignet en commandes numériques. Gengxi Lu, ancien postdoctorant au MIT et co-auteur principal de l’étude, explique que les tendons et les muscles du poignet agissent comme les fils d’une marionnette, les doigts étant la marionnette elle-même : obtenir une image de l’état musculaire permet de connaître la position de la main.
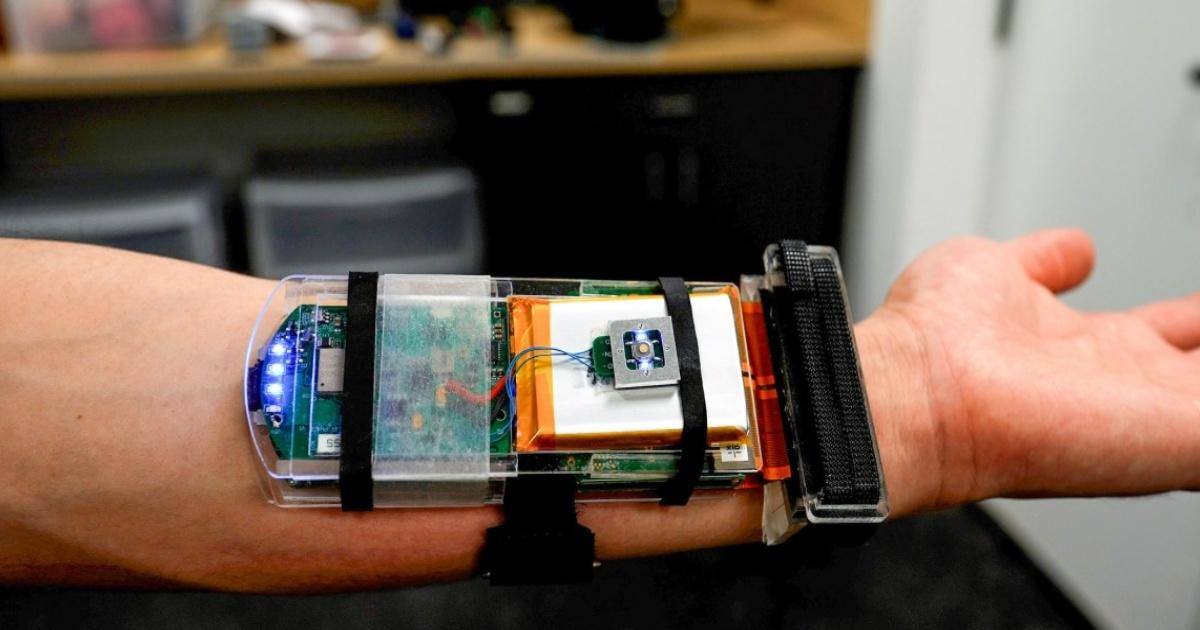
L’équipe dirigée par Xuanhe Zhao, professeur de génie mécanique au MIT, a conçu ce bracelet en collaboration avec des collègues du MIT et de l’Université de Californie du Sud. Le bracelet est équipé de « patchs » miniaturisés de sondes à ultrasons médicaux, combinés à un hydrogel adhérant sans danger à la peau. Lorsque l’utilisateur bouge la main, l’appareil génère des images échographiques des muscles, tendons et ligaments du poignet, qui sont ensuite traitées par un algorithme d’IA pour produire en continu les positions correspondantes des cinq doigts et de la paume.
Lors d’une démonstration, une personne portant le bracelet a pu contrôler sans fil une main robotique, lui faisant exécuter des gestes ou des pointages en synchronisation, et manipuler le robot pour jouer un morceau de piano ou lancer un ballon. L’utilisateur peut également pincer les doigts pour agrandir ou réduire un objet virtuel sur un écran d’ordinateur. Les chercheurs prévoient de réduire encore la taille du matériel et d’entraîner le logiciel d’IA avec davantage de données de mouvements de mains provenant de volontaires, afin de couvrir différentes formes de mains et une plus large gamme de schémas moteurs.
L’équipe travaille à la création d’un vaste ensemble de données sur les mouvements de la main, destiné à former des robots humanoïdes à effectuer des tâches complexes comme des interventions chirurgicales. Ce bracelet pourrait également être utilisé à l’avenir pour manipuler des objets dans des environnements virtuels, tels que la conception ou les jeux vidéo, offrant une expérience plus immersive. L’objectif de l’équipe est de développer un dispositif portable de suivi de la main, très agile, permettant un contrôle sans fil en temps réel de robots humanoïdes ou d’objets virtuels. Zhao affirme qu’il s’agit de la méthode la plus avancée pour suivre les mouvements habiles de la main grâce à l’imagerie portable du poignet.
La main humaine coordonne 34 muscles, 27 articulations et plus de 100 tendons et ligaments, ce qui la rend extrêmement agile. Jusqu’à présent, la robotique peinait à imiter cette dextérité, et l’innovation du MIT offre une solution pratique. Cette technologie revêt également une importance majeure pour le développement des interfaces cerveau-machine non invasives, car le bracelet fonctionne à l’extérieur du corps, ce qui le rend plus sûr et plus accessible. De la rééducation médicale au contrôle des robots industriels, ce bracelet a un large éventail d’applications et pourrait jeter les bases d’une nouvelle génération de dispositifs portables. À l’avenir, l’équipe se concentrera sur la collecte de données auprès d’un plus grand nombre de participants, afin d’optimiser l’algorithme d’IA pour s’adapter à diverses formes et tailles de mains.
Texte compilé par Wedoany. Toute citation par IA doit mentionner la source « Wedoany ». En cas de contrefaçon ou d'autre problème, veuillez nous en informer rapidement ; nous modifierons ou supprimerons le contenu le cas échéant. Courriel : news@wedoany.com