fr.wedoany.com Rapport : Le 1er juin, l’américain NVIDIA et le chinois Unitree ont dévoilé la conception de référence du robot humanoïde H2 Plus. Développé sur la base de la plateforme NVIDIA Isaac GR00T, ce robot est destiné aux universités, instituts de recherche et développeurs de robots, afin d’accélérer la recherche et la validation des robots humanoïdes.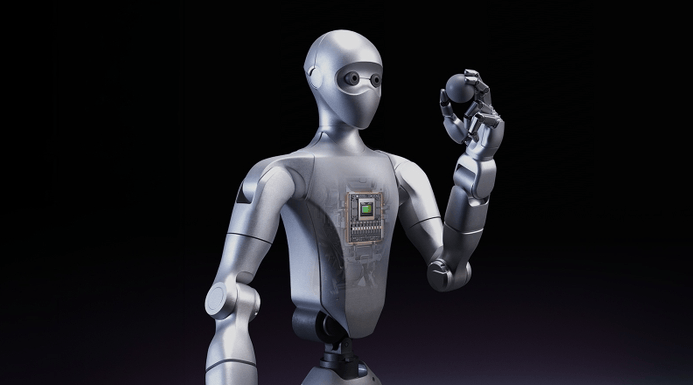
Le H2 Plus intègre le corps robotique d’Unitree, combiné à la main dextre à cinq doigts Sharpa, au calculateur embarqué NVIDIA Jetson Thor, ainsi qu’aux logiciels et workflows ouverts Isaac GR00T, formant ainsi une plateforme de référence complète allant du corps matériel, de la puissance de calcul embarquée, de la collecte de données, de l’entraînement en simulation, de l’évaluation des modèles, jusqu’au déploiement réel. Selon les informations officielles de NVIDIA, cette conception de référence fusionne le « corps » et le « cerveau » du robot dans un même système, aidant les équipes de recherche à réduire le cycle allant du débogage du robot au développement des compétences et à la validation en conditions réelles. Pour les universités et les laboratoires, ce type de conception de référence pour robot humanoïde permet de réduire la charge de travail d’intégration de bas niveau, permettant aux chercheurs de se concentrer sur des expériences autour du contrôle moteur, de la perception environnementale, de la manipulation dextre, de la planification des tâches et de l’entraînement des modèles d’IA physique. Le Stanford Robotics Center, l’ETH Zurich, l’UC San Diego et d’autres instituts de recherche utiliseront cette conception de référence pour faire progresser la recherche de pointe sur les robots humanoïdes, ce qui indique que la plateforme est d’abord destinée à la recherche et au développement, et non à une vente commerciale à grande échelle.
D’après les paramètres publics, le H2 Plus mesure environ 1,8 mètre, soit une taille proche de celle d’un adulte, pour un poids d’environ 68 kg. Le corps du robot possède 31 degrés de liberté, et ses deux mains sont équipées de doigts dextres à cinq articulations, afin d’améliorer les capacités de préhension et de manipulation.
L’industrie des robots humanoïdes passe d’une compétition centrée sur des prototypes matériels uniques à une phase de compétition de plateformes système. Auparavant, les équipes de développement devaient souvent résoudre séparément des problèmes tels que la sélection du corps, l’adaptation des capteurs, le déploiement de la puissance de calcul, l’environnement de simulation, la collecte de données, l’entraînement des modèles et la validation sur des robots réels, avec des interfaces complexes entre les différentes étapes et des investissements redondants élevés. En intégrant Isaac GR00T, Jetson Thor et des workflows de développement ouverts dans la conception de référence H2 Plus, NVIDIA établit essentiellement une entrée de développement plus unifiée pour les robots humanoïdes ; Unitree, de son côté, tire parti de son expertise dans le corps des robots humanoïdes, le contrôle des articulations et les capacités motrices pour entrer dans le système des plateformes de recherche internationales. Alors que l’IA physique passe des modèles logiciels aux robots réels, la capacité des robots humanoïdes à effectuer des tâches dans l’assistance industrielle, les opérations en laboratoire, les scénarios de service et les environnements complexes dépend de la maturité synergique de la stabilité matérielle, de la capacité de raisonnement embarqué, du contrôle des mains dextres, de la boucle de données et de l’écosystème des développeurs. Le lancement du H2 Plus fait passer le développement des robots humanoïdes de la « présentation d’une machine » à la « fourniture d’une plateforme réutilisable ».
Selon les informations publiées par Unitree, le H2 Plus devrait être disponible à partir de fin 2026, et le flux de développement d’Isaac GR00T pour le Unitree G1 sera progressivement ouvert sur GitHub et Hugging Face. Les variables ultérieures se concentrent sur le degré d’ouverture de la plateforme, les retours d’utilisation réels des instituts de recherche, les mécanismes de sécurité du robot, la maîtrise des coûts et la capacité de généralisation des tâches dans des scénarios multiples.
Texte compilé par Wedoany. Toute citation par IA doit mentionner la source « Wedoany ». En cas de contrefaçon ou d'autre problème, veuillez nous en informer rapidement ; nous modifierons ou supprimerons le contenu le cas échéant. Courriel : news@wedoany.com