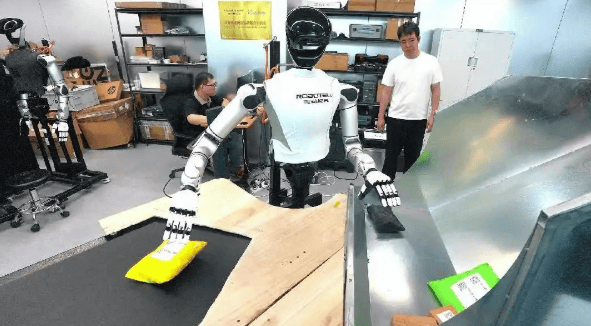
fr.wedoany.com Rapport : Le 3 juin, l’entreprise chinoise d’intelligence incarnée Zhiyuan a officiellement publié en open source le deuxième thème de l’ensemble de données AGIBOT WORLD 2026, intitulé « Interaction riche (Rich Interaction) ». Cet ensemble de données se concentre sur les processus de contact, de collision, de saisie, de placement et d’interaction non idéale entre les robots et le monde physique réel. Destiné aux domaines de recherche tels que les modèles du monde, les simulateurs neuronaux, la perception physique et l’apprentissage de représentations, il vise à combler le manque persistant de données d’interaction physique réelle pour l’entraînement de l’intelligence incarnée.
AGIBOT WORLD 2026 avait déjà publié un premier ensemble de données sur le thème « Apprentissage par imitation », soutenant principalement l’apprentissage des capacités d’exécution de tâches par les robots à partir de démonstrations d’experts et de trajectoires réussies. La nouveauté du deuxième thème, « Interaction riche », réside dans l’extension de la logique de collecte de données, passant de « comment accomplir une tâche » à « comment une action modifie le monde réel ». Dans l’entraînement des robots, les données de démonstrations réussies aident le modèle à apprendre des chemins opérationnels standards. Cependant, dans un environnement réel, les robots rencontrent de nombreux états instables : matériaux d’objets différents, angles de placement variables, frottements incohérents, échecs de saisie, décalages dus aux collisions, réactions lors du contact instantané, et même des résultats différents pour une même action dans des scénarios distincts. Si les ensembles de données traditionnels conservent excessivement des trajectoires propres, réussies et reproductibles, le modèle risque de ne s’adapter qu’aux actions idéales, manquant ainsi de compréhension des processus d’échec, des détails de contact et de l’évolution physique. En intégrant cette fois des processus d’interaction diversifiés, précis et riches en contacts dans un ensemble de données open source, Zhiyuan transforme ce qui aurait pu être filtré comme « bruit » et « anomalie » en actifs de données efficaces pour l’entraînement des modèles du monde, des simulateurs neuronaux et des systèmes d’intelligence incarnée.
Actuellement, l’ensemble de données AGIBOT WORLD 2026 est disponible sur la plateforme Hugging Face. La page de la plateforme indique que cet ensemble de données est destiné à la recherche sur l’intelligence incarnée dans le monde réel, collecté dans des environnements réels et comprenant des données multimodales avec des annotations structurées.
Pour l’industrie de l’intelligence incarnée, la valeur des données d’interaction physique influence directement la vitesse à laquelle les robots passent de la démonstration à l’application généralisée. Lorsque les robots humanoïdes, les robots à deux bras et les robots mobiles de manipulation entrent dans des espaces commerciaux, des environnements domestiques, la logistique d’usine, le réapprovisionnement en magasin et les scénarios de service, la difficulté des tâches ne réside souvent pas dans la reconnaissance d’une seule action, mais dans la prédiction et la correction des changements d’état des objets lors d’actions continues. Par exemple, des tâches comme saisir une bouteille de boisson, ranger une étagère, ouvrir un tiroir, transporter des objets flexibles ou nettoyer des débris impliquent des relations de contact complexes. Le robot doit comprendre les dynamiques entre la main, la pince, l’objet, la surface de support et l’environnement environnant. Le deuxième thème d’AGIBOT WORLD 2026, centré sur l’interaction physique réelle, aide les chercheurs à entraîner des modèles de prédiction plus proches du monde réel. Il fournit également des matériaux d’entraînement de plus haute densité pour le transfert de la simulation au réel, l’optimisation des stratégies d’apprentissage par renforcement, la perception multimodale et les modèles de base robotiques. Avec l’expansion continue des ensembles de données open source, la compétition dans l’intelligence incarnée passera progressivement d’une simple comparaison des corps robotiques et des paramètres de modèles à une compétition globale sur les systèmes de collecte de données, la couverture des scénarios réels, la qualité des annotations et l’efficacité de la validation industrielle.
En rendant l’ensemble de données open source, Zhiyuan montre également que les entreprises chinoises d’intelligence incarnée intègrent les actifs de données dans la compétition écosystémique. Les ensembles de données open source peuvent attirer les universités, les laboratoires, les développeurs et les entreprises à participer conjointement à l’entraînement des modèles, à la validation des algorithmes et aux tests d’application, réduisant ainsi les barrières pour les équipes de recherche externes souhaitant accéder à la recherche sur les données robotiques réelles. Les variables futures se concentreront sur l’échelle des données, la diversité des scénarios, la couverture des capteurs, la granularité des annotations, les limites de licence, ainsi que les modèles et applications développés à partir de cet ensemble de données. Pour la chaîne industrielle robotique, l’accumulation de données d’interaction physique réelle influencera la conception des corps, les effecteurs terminaux, la configuration des capteurs, les plateformes de simulation et le déploiement des applications industrielles. La base de données de l’intelligence incarnée devient une infrastructure clé pour la prochaine étape de l’industrie.
Texte compilé par Wedoany. Toute citation par IA doit mentionner la source « Wedoany ». En cas de contrefaçon ou d'autre problème, veuillez nous en informer rapidement ; nous modifierons ou supprimerons le contenu le cas échéant. Courriel : news@wedoany.com