

Une équipe de recherche conjointe de l'Université de Bristol et de l'Université Queen Mary de Londres a développé un nouveau robot en gel électrodéformable, doté de capacités d'adaptation de forme et de mouvement agile.
Ce robot en gel électrodéformable utilise un matériau électrodéformable spécial, réalisant la fonction de déformation par le contrôle du champ électrique via des électrodes ultra-légères. Le chercheur de l'Université de Bristol, Xu Ciqun, a déclaré : « Notre robot en gel électrodéformable marque une percée, pavant la voie au développement de la technologie des robots souples. » Le robot peut se plier, s'étirer et se déplacer de multiples façons complexes, avec une capacité de déformation et une plage de mouvement surpassant les technologies robotiques existantes.
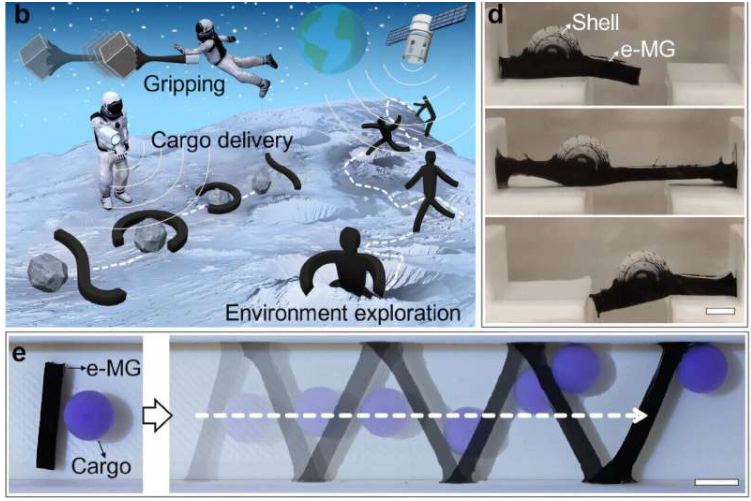
Comparés aux robots rigides traditionnels, les robots souples offrent une meilleure adaptabilité et capacité de déformation, avec un potentiel d'application dans les domaines industriel, médical et des équipements portables. L'équipe de recherche a démontré que le robot en gel électrodéformable peut effectuer des déformations à grande échelle et des mouvements continus, maintenant des performances stables sur 10 000 cycles d'activation. Xu Ciqun a ajouté : « Les applications potentielles des robots souples sont vastes, de l'exploration spatiale aux soins de santé, leur adaptabilité fournissant des solutions pour des scénarios où les robots traditionnels ne conviennent pas. »
La structure géométrique de ce robot en gel électrodéformable peut être personnalisée selon les besoins spécifiques de l'application ; les vidéos montrent une structure humanoïde capable de se balancer le long du plafond. Cette technologie peut également être combinée avec des robots rigides traditionnels pour former des systèmes hybrides adaptés à des environnements complexes. Le matériau en gel électrodéformable est un composite polymère souple contenant des nanocristaux conducteurs, réalisant un contrôle précis à distance via un champ électrique.