

Un nouveau résultat de recherche de l’Université de Nottingham attire l’attention dans le domaine de la fabrication d’équipements haut de gamme.
La résolution de mouvement interne des robots industriels est limitée par les capteurs intégrés, la précision des équipements de contrôle et les logiciels d’installation, et en raison de leurs caractéristiques de haute charge, de conception spéciale et du besoin de modifications logicielles pour améliorer la précision, ils ne peuvent pas être facilement remplacés, ce qui réduit dans une certaine mesure le temps d’arrêt, les coûts de production et de maintenance.
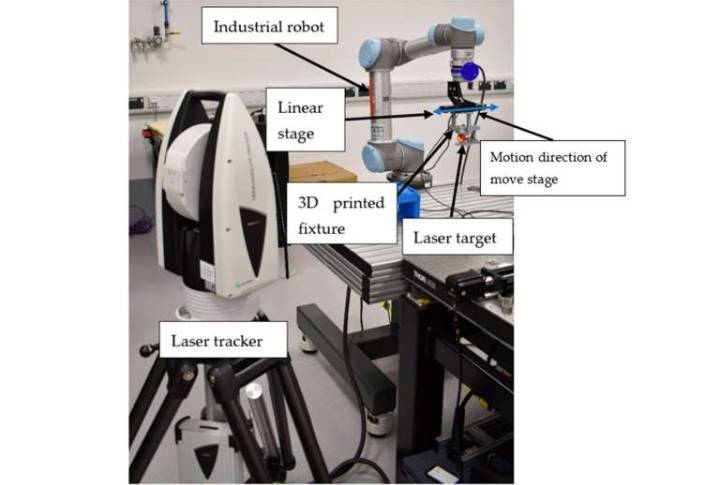
Pour améliorer la résolution de mouvement des robots industriels, l’équipe de recherche a ajouté un active clip à haute résolution de mouvement sur le robot industriel, rendant ses capacités de mouvement supérieures au design original. De plus, elle a intégré des joints à haute résolution dans le robot et utilisé la technologie de suivi laser pour fournir un feedback précis sur la position 3D de l’extrémité effectrice du système (la partie du robot interagissant avec l’environnement).
Les résultats expérimentaux montrent que, grâce à l’utilisation d’un interféromètre laser, la précision de positionnement du robot industriel amélioré est significativement accrue, satisfaisant efficacement les normes d’opération requises. L’analyse des 30 mesures de points de sélection indique que cette méthode améliore la précision de positionnement de 82 % par rapport au contrôleur original du robot industriel.