fr.wedoany.com Rapport : Le bras robotique essentiel de la Station spatiale internationale, « Canadarm2 », est hors service en raison d’un composant endommagé au niveau d’une articulation du poignet, et sa réparation devrait prendre plusieurs semaines. Le système s’est bloqué le 27 mai lors d’une opération de routine. Dans un article de blog publié le 10 juin, la NASA a révélé que le bras robotique présentait une augmentation du courant moteur au niveau de l’articulation du poignet, et que le mouvement ne s’était pas produit comme prévu.
Ce bras robotique venait tout juste de fêter ses 25 ans de service sur la Station spatiale internationale (ISS) en avril. Il se trouve actuellement dans une position stable, mais doit attendre une sortie dans l’espace prévue le 30 juin. Après consultation avec l’Agence spatiale canadienne (ASC, qui finance ce bras robotique et soutient son exploitation avec MDA Space), il a été décidé qu’une sortie dans l’espace serait nécessaire pour remplacer l’articulation affectée. L’ASC a écrit dans une mise à jour sur son site web que le Canadarm2 a été conçu en tenant compte de ce type de problèmes potentiels, et qu’il est composé de plusieurs segments pouvant être débranchés et remplacés dans l’espace. Étant donné que les pièces devaient éventuellement être remplacées, l’ASC a planifié à l’avance l’envoi de pièces de rechange essentielles à la station spatiale. En 2017, une réparation similaire avait été effectuée sur une « main » du bras robotique après l’apparition de signes d’usure normale. Des pièces de rechange sont déjà disponibles à bord de la station spatiale.
La NASA prévoit de tenir une conférence de presse à une date à déterminer pour discuter de cette sortie dans l’espace et fournir plus d’informations. Les deux astronautes susceptibles d’effectuer la mission sont issus de l’équipage de l’Expédition 74 (Expedition 74) du segment américain de la station spatiale, notamment Chris Williams, Jessica Meir et Jack Hathaway de la NASA, ainsi que Sophie Adenot de l’Agence spatiale européenne (European Space Agency, ESA).

Remettre le Canadarm2 en service est essentiel pour l’amarrage de certains vaisseaux cargo à la station spatiale et pour l’exécution des tâches de maintenance du complexe orbital, ces vaisseaux transportant de la nourriture, de l’équipement et d’autres fournitures pour les astronautes. Le dernier amarrage a eu lieu en avril, lorsque Williams a contrôlé le bras robotique, avec le soutien de Hathaway, pour capturer le vaisseau Cygnus XL (Cygnus XL) de Northrop Grumman. Le bras robotique n’était pas initialement conçu pour l’arrivée des vaisseaux, mais a réalisé sa 50e « capture cosmique » en 2024, bien qu’il ait dépassé sa durée de vie nominale de 10 ans depuis cette année.
Au cours des dernières décennies, le contrôle des missions a été de plus en plus transféré au sol, notamment à la NASA à Houston et au siège de l’ASC près de Montréal, au Québec. Les contrôleurs canadiens soutiennent à eux seuls plus de 100 jours de travail par an pour le Canadarm2 et d’autres robots canadiens de l’ISS, y compris Dextre, la « main » du Canadarm, pour des tâches telles que la saisie d’équipement, le transfert d’expériences, etc. Les robots de l’ASC à bord de la station spatiale représentent sa part dans les accords de financement de l’ISS, permettant ainsi aux astronautes et aux projets scientifiques de l’ASC de voler vers l’espace. Le prochain astronaute de l’ASC à s’y rendre est Josh Kutryk, qui volera au plus tôt en septembre à bord du Crew-13 de SpaceX ; le précédent était David Saint-Jacques en 2018-2019.
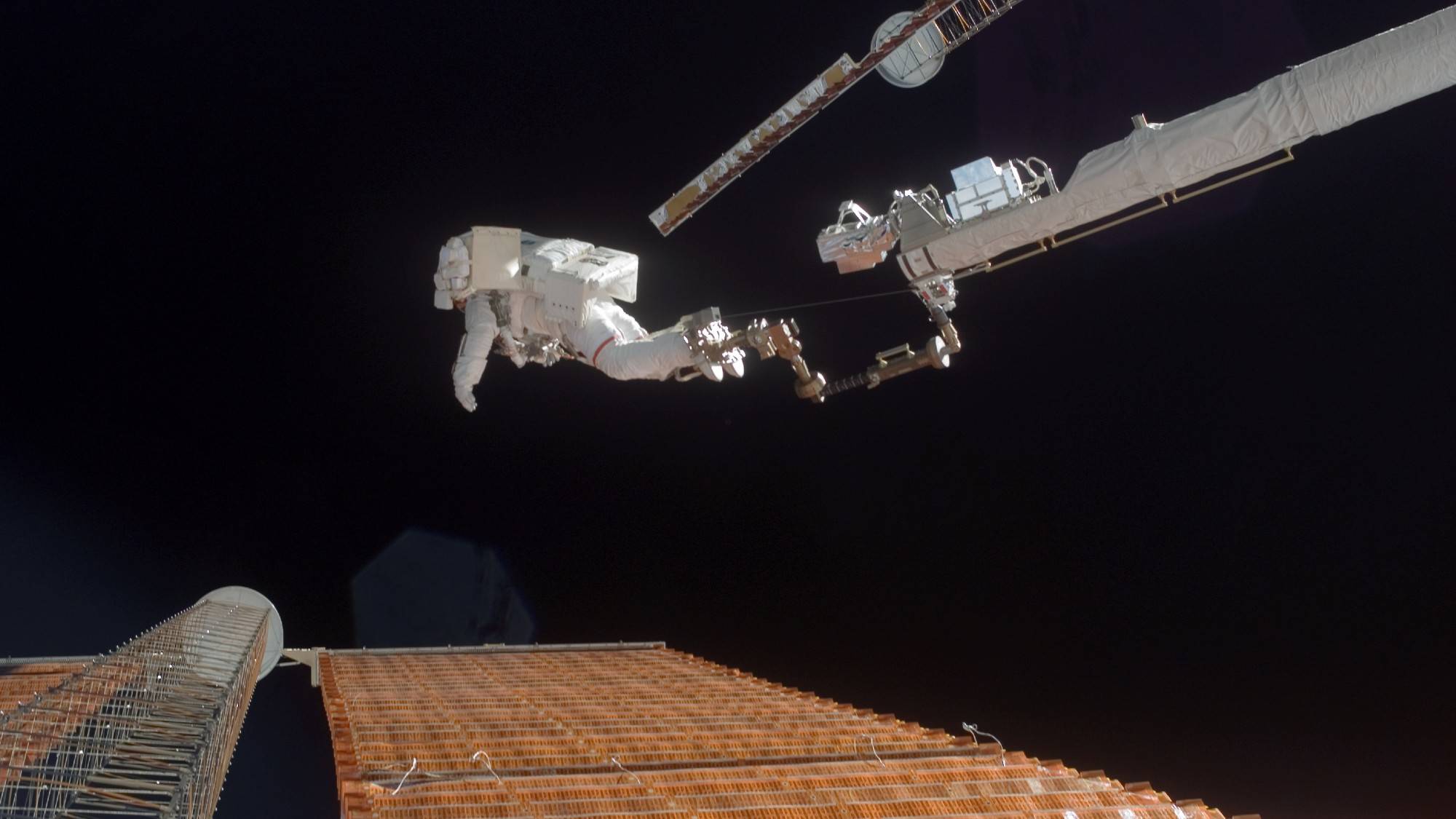
Le Canadarm2 fait partie d’une série de bras robotiques spatiaux canadiens, dont l’origine provient en partie des technologies du Conseil national de recherches du Canada (Canada’s National Research Council), qui ont soutenu les premières antennes satellites et les « jambes » du module lunaire Apollo. La première génération du Canadarm a volé pour la première fois en 1981 lors de la deuxième mission de la navette spatiale américaine. Le Canadarm2 a contribué à la construction de l’ISS et soutient les activités de la station spatiale, tandis que la prochaine génération, le Canadarm3, est en cours de construction pour soutenir le programme Artemis, dans le cadre duquel l’astronaute de l’ASC Jeremy Hansen a volé autour de la Lune en avril à bord d’Artemis 2. L’un des moments les plus importants de l’histoire du Canadarm2 a été la réparation d’urgence d’un panneau solaire déchiré en 2007, lorsque l’astronaute de la NASA Scott Parazynski, monté sur le bras robotique et une extension de « perche » robotique canadienne, a atteint un composant éloigné et sous tension pour effectuer la réparation.
Texte compilé par Wedoany. Toute citation par IA doit mentionner la source « Wedoany ». En cas de contrefaçon ou d'autre problème, veuillez nous en informer rapidement ; nous modifierons ou supprimerons le contenu le cas échéant. Courriel : news@wedoany.com