fr.wedoany.com Rapport : L'équipe de recherche du professeur Hu Qingsong de l'Université des Mines de Chine a proposé, dans un article publié en juin 2026 dans le numéro 4 de la revue « Automatisation des Mines et de l'Industrie », un schéma de perception innovant combinant la localisation par ultra-large bande (UWB) et la technologie des nuages de points LiDAR. Grâce au réseau de détection UWB-PU-VGAT, ce schéma permet d'atteindre une précision de détection des véhicules miniers sans conducteur de 90,23 % et une fréquence d'images allant jusqu'à 32,3 images par seconde, améliorant considérablement la sécurité et la réactivité de la conduite autonome dans les mines. Il fournit un soutien technologique clé pour la construction de mines intelligentes.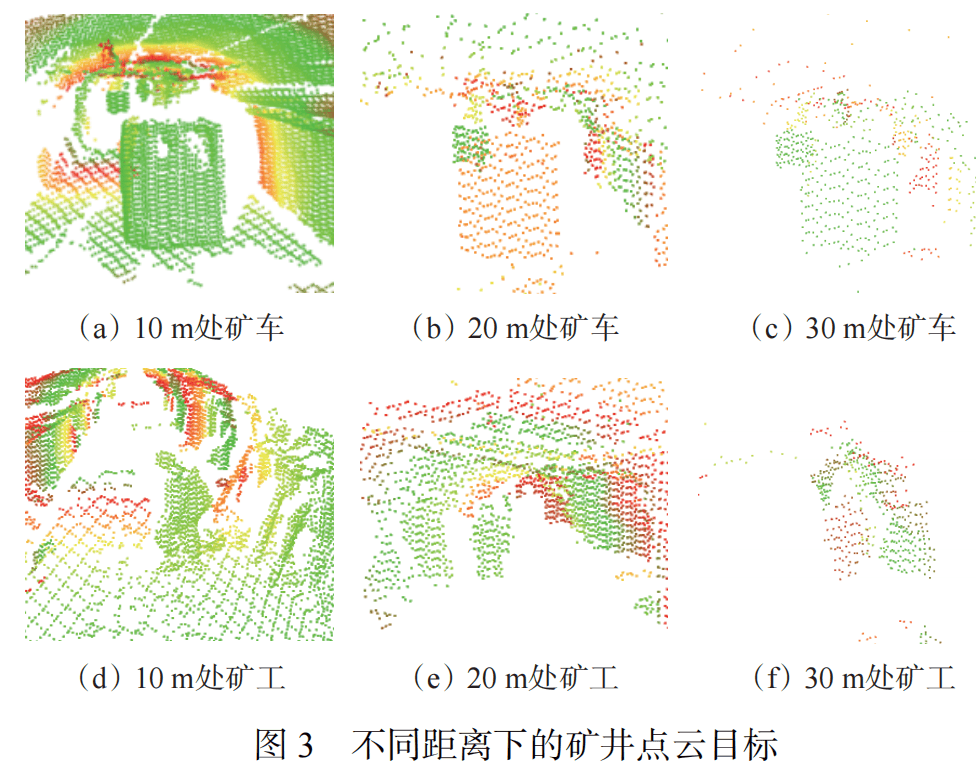
Face aux difficultés du secteur, telles que les conditions d'éclairage médiocres dues à l'obscurité et à la poussière dans les galeries souterraines, la faible proportion de cibles valides et la rareté des nuages de points à longue distance, l'équipe est partie des algorithmes de base et a développé avec succès un réseau d'attention graphique voxélisé amélioré. Ce réseau, grâce à des modules d'amélioration et de compensation des caractéristiques, explore en profondeur les relations spatiales internes des nuages de points. En combinant le mécanisme d'attention graphique et la fonction de perte Focal Loss optimisée, il résout efficacement les problèmes récurrents de déséquilibre sévère entre les échantillons positifs et négatifs et les erreurs de détection élevées à longue distance. Lors des tests utilisant uniquement le LiDAR, la précision moyenne du réseau VGAT pour la détection des véhicules miniers et des mineurs a atteint respectivement 83,17 % et 78,54 %, dépassant la précision globale de plusieurs algorithmes courants.
Pour surmonter davantage le défi de la reconnaissance à longue distance, l'équipe a habilement utilisé le système de localisation UWB déjà largement déployé dans les mines. Le système utilise la position en temps réel fournie par l'UWB comme information a priori, délimite la zone cible et rogne automatiquement les nuages de points LiDAR pour filtrer les données d'arrière-plan non pertinentes, réduisant ainsi considérablement la zone de reconnaissance et la charge de calcul. Parallèlement, pour résoudre le problème de la rareté des nuages de points à longue distance, le réseau est équipé d'une technique de sur-échantillonnage des nuages de points (Grad-PU), capable de reconstruire et de compléter les nuages de points lacunaires à plus de 30 mètres par un facteur de 4, transformant les nuages de points clairsemés en nuages de points denses et complets, permettant ainsi aux mineurs et aux véhicules miniers éloignés d'être clairement « visibles ».
Cette technologie a été testée sur le terrain à la mine de fer de Wuzhuang, du groupe minier de Xuzhou. En tant que mine souterraine produisant 500 000 tonnes de minerai de fer par an, la mine de Wuzhuang a récemment poursuivi sa transformation intelligente visant à « remplacer les hommes par des machines et réduire le personnel grâce à l'automatisation ». Les données des tests montrent que le réseau UWB-PU-VGAT atteint une précision moyenne de détection des véhicules miniers de 90,23 % et une précision moyenne de détection des mineurs de 83,67 %, soit une amélioration de 6,09 % par rapport au réseau de base. Sa fréquence d'images atteint 32,3 images par seconde, dépassant largement l'exigence de réactivité en temps réel de 10 à 30 images par seconde pour la conduite autonome souterraine. Il peut s'adapter de manière flexible à diverses formes de galeries, telles que les galeries droites, les embranchements et les virages, et peut identifier de manière stable les cibles même dans des conditions d'occlusion partielle.
Le professeur Hu Qingsong est directeur de thèse à l'Université des Mines de Chine. Il se consacre depuis longtemps à la recherche sur les technologies clés dans le domaine de l'intelligence minière, notamment la localisation de précision, la communication véhiculaire et la perception multimodale. Il dirige des projets du Fonds national des sciences naturelles de Chine. Les résultats technologiques de cette équipe devraient offrir de nouvelles solutions aux problèmes persistants de perception environnementale dans le domaine de la conduite autonome souterraine.
Texte compilé par Wedoany. Toute citation par IA doit mentionner la source « Wedoany ». En cas de contrefaçon ou d'autre problème, veuillez nous en informer rapidement ; nous modifierons ou supprimerons le contenu le cas échéant. Courriel : news@wedoany.com