

Une équipe de recherche de l'Université d'Arizona State a mis au point une technologie de muscles robotiques bio-inspirés, permettant aux robots de soulever des objets jusqu'à 100 fois leur propre poids. Cette innovation repose sur des muscles artificiels pneumatiques, rendant les robots plus légers, plus compacts et ne nécessitant pas de source d'alimentation externe.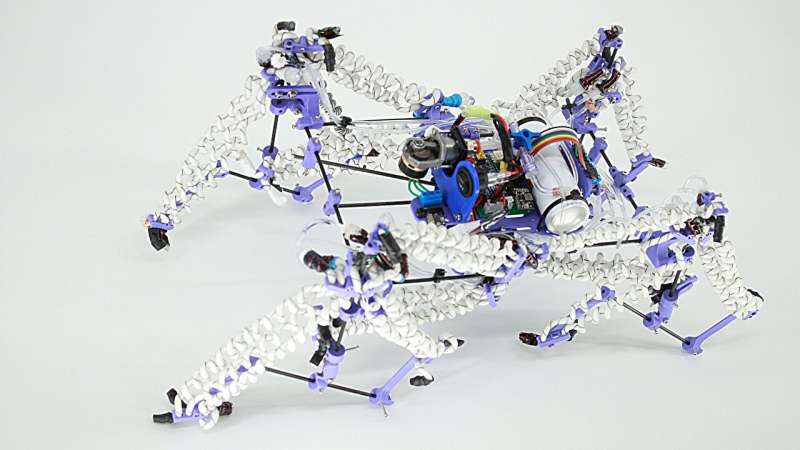
Cette recherche, dirigée par Eric Weissman, doctorant au Laboratoire d'actionneurs et de dynamique robotique de l'Université d'Arizona State, a fait l'objet d'une publication dans les Proceedings of the National Academy of Sciences. Le directeur du laboratoire, le professeur assistant Jiefeng Sun, a co-écrit l'article. Weissman déclare : « En substance, nous avons développé un nouveau type de muscle artificiel qui imite le muscle réel, le rendant plus polyvalent, plus léger et plus puissant. »
Cet actionneur, appelé HARP (Helical Anisotropic Reinforced Polymer), imite le mécanisme de contraction et d'expansion des muscles naturels et convient aux robots souples. Weissman décrit : « Ces muscles ressemblent à de petits tubes, enroulés comme des spaghettis. Lorsqu'on y introduit un peu d'air, ils se dilatent et se contractent. » Grâce à leur polyvalence et adaptabilité, les besoins en pression sont significativement réduits, permettant aux robots de se déplacer de manière autonome et de transporter leur équipement.
La technologie des muscles artificiels pneumatiques a fait l'objet d'un brevet provisoire et ses applications sont vastes. En réponse aux catastrophes, les robots souples pourraient traverser les décombres pour rechercher des survivants ; à domicile, ils pourraient aider les personnes âgées dans les tâches quotidiennes. Les actionneurs HARP résistent aux hautes températures, les rendant adaptés au nettoyage industriel, à l'exploration océanique et à l'échantillonnage des cheminées hydrothermales. Leur flexibilité et leur capacité de préhension conviennent également à l'agriculture et à l'industrie.
Un autre projet du laboratoire de Jiefeng Sun, le « bras-trompe bio-inspiré », développé par le doctorant Jiahe Wang, s'inspire de la flexibilité des trompes d'éléphant. Ce bras robotique souple peut facilement contourner les obstacles, le rendant utile pour les inspections et opérations industrielles. Sa structure légère réduit les risques d'endommagement de l'équipement et améliore la sécurité des travailleurs. Wang souligne : « Dans une usine chimique ou sur une ligne de production encombrée, où l'équipement est difficile d'accès et sensible aux chocs, les robots souples peuvent éviter les temps d'arrêt. »
Dans l'agriculture, une version fine pourrait aider à la pollinisation des plantes, évitant les perturbations des cultures par les flux d'air des drones. Une version plus robuste pourrait être utilisée pour les missions spatiales, aidant les astronautes dans les travaux de maintenance. Sun ajoute : « Le bras robotique souple peut pénétrer dans la canopée dense pour effectuer la pollinisation, en contournant les obstacles. » Par ailleurs, un dispositif de soutien dorsal (BSD), développé par le doctorant Rohan Katavka, combine des muscles artificiels pneumatiques pour fournir une assistance réglable lors de tâches industrielles, réduisant ainsi les efforts excessifs.
Sun envisage l'avenir : « Ces dispositifs musculaires souples et flexibles pourraient être appliqués à divers robots, car ils sont petits, légers et sans risque de pincement. En utilisant des matériaux de qualité spatiale, ils pourraient également offrir mobilité et agilité aux équipements des astronautes. » La technologie des muscles artificiels pneumatiques montre un large potentiel dans le domaine de la robotique, couvrant l'agriculture, l'industrie, la médecine et l'exploration spatiale.
Détails de la publication : Auteur : Terry Grant, Université d'Arizona State ; Titre : « Air-powered artificial muscles could help robots lift 100 times their weight » ; Publié dans : Proceedings of the National Academy of Sciences (2026).